
Object Detection for Autonomous Snow Grooming Applications
This post is a technical overview of my Metis capstone project, completed over a 3-week span. I developed a proof of concept for autonomous snow grooming vehicles at ski resorts. I accomplished this by training a Faster R-CNN object detection model in PyTorch to detect/classify obstacles in dash cam footage from vehicles moving through a ski resort.
The code for this project can be found here.
Note: There is a button within the .ipynb file on GitHub to open it in an interactive Google Colab environment.
Motivation & Objective
This was a completely open-ended project - we were simply told to choose a “passion project” in any subdomain of machine learning. I was overwhelmed with the task of choosing from an infinite project space, but quickly asked myself a simple question to narrow down my options: What machine learning realm did I most want to explore that hadn’t yet been covered in the curriculum? The answer was Computer Vision.
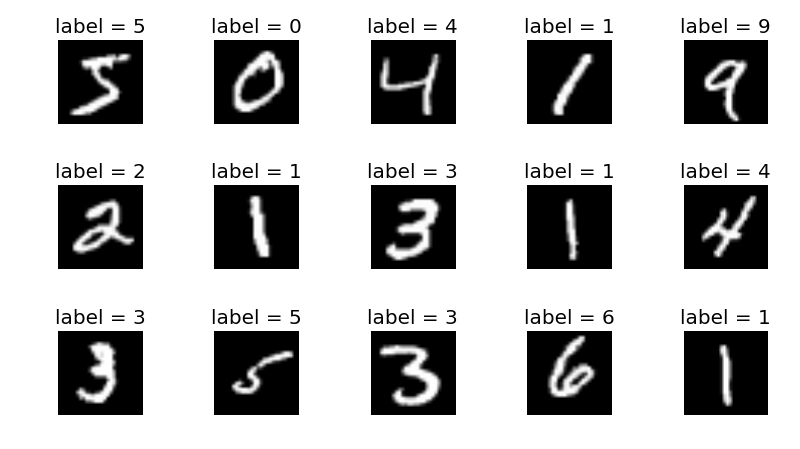
MNIST handwritten digits dataset, commonly used for introducing image recognition concepts. (Image: Towards Data Science)
Yet, even computer vision is a vast field of study. I thought back to the Metis curriculum, when we reviewed a relatively simple application of convolutional neural networks (CNN) to perform image recognition (via the classic MNIST handwritten digits dataset). However, I wanted to build on top of that knowledge and challenge myself with something more complex. The logical next step seemed to be object detection.
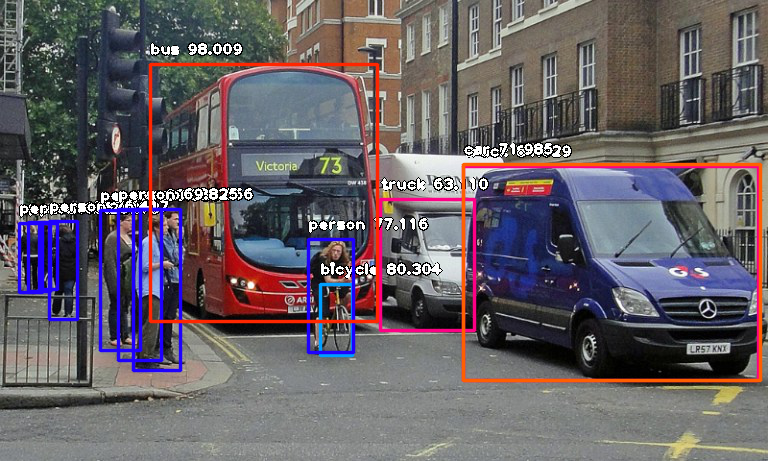
An example of object detection in autonomous vehicle applications. (Image: Towards Data Science)
I knew that object detection was one component of autonomous vehicle technology, but I felt hesitant. There are a lot of open source autonomous vehicle datasets out there, but I didn’t feel like I could extract any more value than the thousands (?) of people with PhD’s in computer vision that had already done so.
This was the point at which I considered some of my extracurricular passions. I happen to really enjoy skiing. If you’ve ever been to a ski resort, you might have seen a large vehicle that looks like some combination of a snow plow and a military tank. These are “snow cats” - continuous track vehicles designed to move on rugged, snowy terrain. Snow cats are sometimes used for transport, but are mostly used as “snow groomers” at ski resorts. Snow grooming vehicles smooth and move around snow to make the mountain safer and more enjoyable for skiers and snowboarders. They operate nightly, and also sometimes during the day to keep the mountain open when there is heavy snowfall.
 A snow groomer. (Image: Pistenbully)
A snow groomer. (Image: Pistenbully)
This felt like it could be a fun, novel application of autonomous vehicle technology. Snow grooming is expensive and potentially hazardous - both things that can possibly be reduced through automation. Furthermore, it is a well-defined problem in the sense that a snow grooming vehicle only has to be able to detect a narrow subset of obstacles as compared to a car driving on a busy city street. Due to the fact that autonomous vehicle software requires many different components (instance segmentation, trajectory planning, etc.), I defined my project as a proof of concept for autonomous snow grooming vehicles using only object detection.
The deliverables of this project were two-fold:
- A neural network trained to detect objects in images that a snow grooming vehicle might see in its field of view.
- A demo created by applying the model to snow groomer dash cam footage to draw boundary boxes around detected objects.
Methodology
Object Detection
An object detection model is designed to return two sets of outputs for a given image:
- The detected instances of semantic objects of a variety of classes in the image (ex. “tree”, “person”, “car”).
- A set of Cartesian coordinates describing the boundary boxes of each detected object in units pixels.
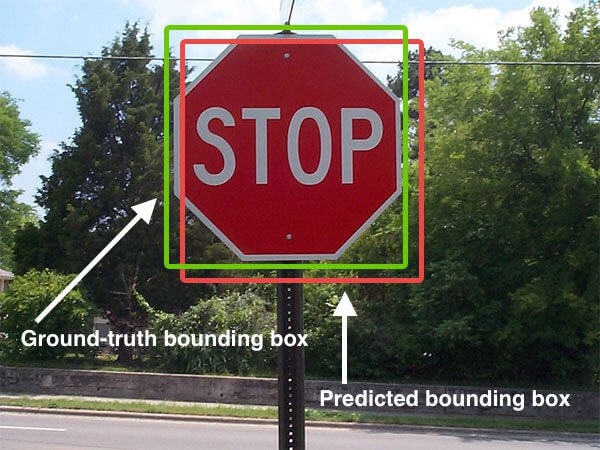
Boundary box for a stop sign in an image. (Image: PyImageSearch)
Therefore, it follows that the training data for such a model must contain “ground truth” boundary boxes with annotated class labels on each image.
Data
It turns out that it is extremely labor intensive to manually draw boundary boxes on thousands of images. In fact, it is common for companies tackling computer vision problems to out source the annotation/labeling task to “mechanical turks” - a.k.a. humans paid per labeling task they successfully complete. New start-ups have sprouted up to specifically provide labeling services.
Luckily, the open-source community once again provides, in the form of pre-annotated datasets for object detection.
I decided to use Google’s Open Images Dataset
via the openimages Python library. This dataset
contains images as well as corresponding .xml files containing the object classes and boundary boxes for each
image. This required me to write an xml parser
to extract the boundary box information, but was generally an easy dataset to interact with.
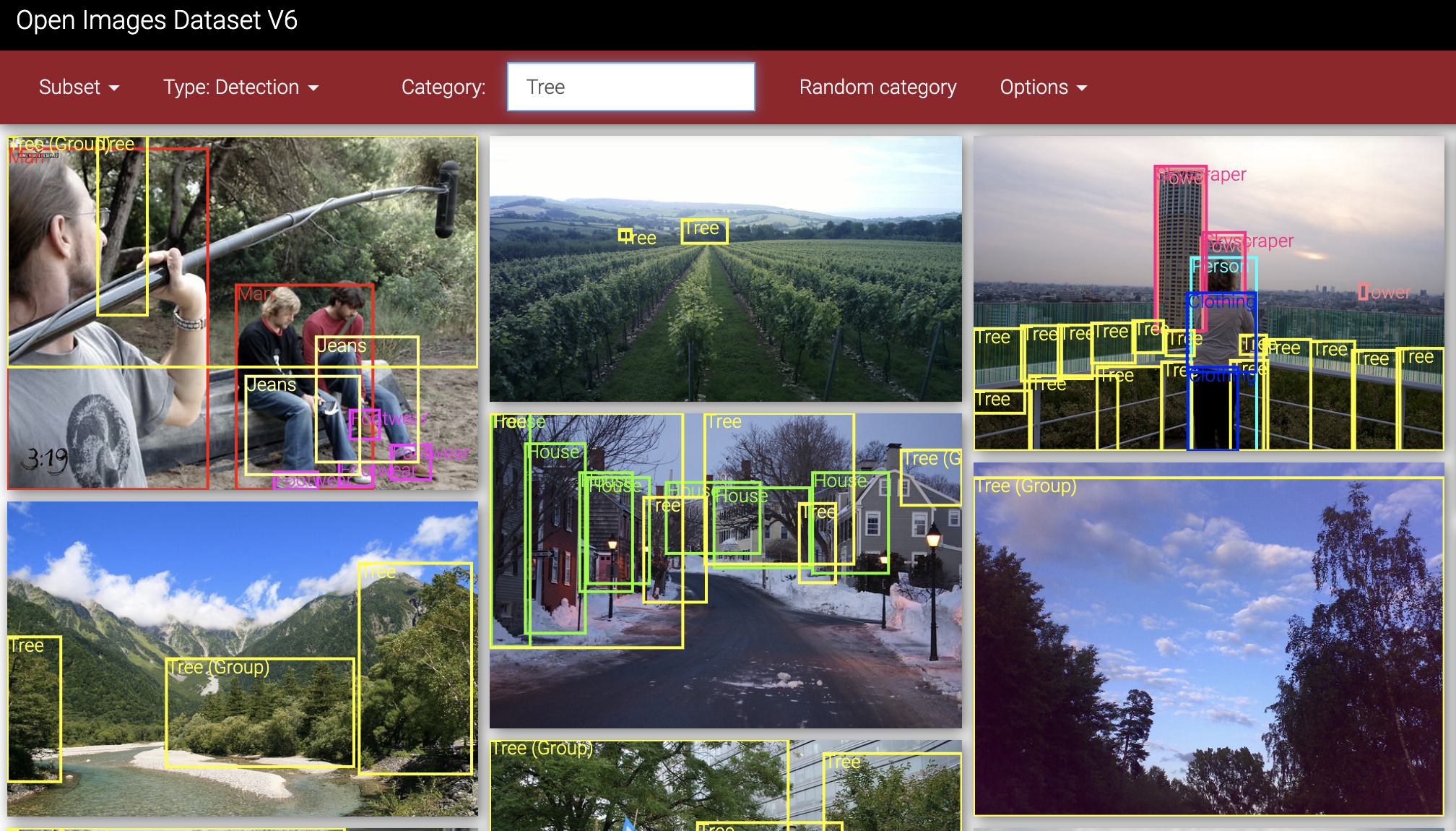
Annotated images from Google Open Images Dataset.
While I initially wanted to detect up to ten different classes, I ran into performance issues that I couldn’t remedy in the short term. The trade-off was: create a model that predicts many object classes with low confidence, or one that predicts fewer object classes with higher confidence. I chose the latter option which resulted in three object classes for the model to detect:
- Person
- Tree
- Ski Lift Pole (Note: The Google Open Images dataset only had images labeled “street light”, which look quite similar
to the pole structure for a ski lift, so I assumed it would be a sufficient proxy. I turned out to be right:
when presented with only images/video from a ski mountain, the model recognized poles as “street lights”. I simply
renamed the class label in the
.xmlfiles from the dataset to “pole”.)
These three classes seemed like the most essential objects for a snow grooming vehicle to be able to detect as it moves up and down the mountain. I downloaded approximately 5000 images per class, some containing multiple object instances (for instance, 3 annotated trees in a single image).
Transfer Learning
The primary machine learning technique used for this project was transfer learning. In general, transfer learning involves taking a model already trained on a large dataset for some task and repurposing it for another task. More specifically, the process is as follows:
- Take a pre-trained neural network architecture designed to perform a particular task.
- “Freeze” most of the layers in the neural net so that their weights can’t be updated when training on a new dataset.
- Replace the final (few) classification layer(s) so that it is both trainable and able to predict the number of classes specific to the new task.
- Train the model on a custom dataset suited to the new task.

Transfer Learning (Image: Pennylane)
It may be obvious to some, but what are some reasons you’d want to use transfer learning?
- In the context of image classification/object detection, fine-tuning a neural net pre-trained on a vast image set allows your new model to take advantage of some general network “fundamentals”, such as layers that pick up on edges, shapes, and components of a particular object in an image. The final model adds a layer that picks up more complex combinations of fundamental features that separate the various images/objects.
- Since only a fraction of the weights of the neural network have to be updated with every training epoch, the model can be trained much more quickly.
Choosing the Right Tools
Determining which computing platform and neural network library to use took up the majority of my time while working on this project.
Computing Platform
Due to the fact that training neural networks on large datasets can be extremely CPU and RAM intensive, it is common to use a GPU on a cloud compute platform rather than a laptop. Unfortunately, I initially jumped to an overly complex option. I provisioned a server on Google Cloud (GCP), but quickly realized that this was too “heavyweight” and costly for my project, and shut down the server.
I ended up choosing to work with the popular Google Colaboratory. This platform, allows you to freely run software on GPUs using a coding interface based on Jupyter Notebook, and host and access data on a Google Drive folder.
Neural Network Toolkit
As most people in the data science community are aware, the two most popular neural network libraries written in Python are Google’s TensorFlow and Facebook’s PyTorch. I initially began to work on this project using Keras (a simplified API within the TensorFlow library), simply because that’s the library we had used in demos while learning about neural networks at Metis.
I wasn’t able to quickly achieve a workable prototype of my model using TensorFlow. I still am not 100% sure why this happened, since everything I knew about TensorFlow indicated its vast capabilities. It could have been that TensorFlow actually does have a steep learning curve, or that the tutorials available in their documentation are better suited for other tasks, or perhaps my lack of understanding in general. Due to the extremely limited time allotted for this project, I gracefully took the hit to my ego, and began to search around blogs and other documentation for a suitable solution.
I eventually stumbled upon the
Torchvision Object Detection Finetuning Tutorial,
which turned out to be the perfect starting point, and led me to choose PyTorch as the primary toolkit for this project.
(That being said, there was still a decent amount of work necessary to adapt the tutorial such as ingesting a different
data format, creating a custom torch.utils.data.Dataset class, removing the “Mask R-CNN” model for instance
segmentation, adding custom image transformations for training, and much more.)
Auxiliary Computer Vision Tasks
Demo-ing this model on video footage required the auxiliary task of drawing predicted boundary boxes and labels on each frame. The choice to perform this task was a bit more obvious - OpenCV. OpenCV is one of the most popular libraries in the computer vision community. In addition to containing libraries for image augmentation, it also has its own machine learning modeling libraries. I used the Python implementation of OpenCV, opencv-python to carry out the boundary box drawing task.
Training the Model
I would have liked to spend a lot more time trying out different optimizers and hyperparameters for the model, but given the time constraint I settled on a model with the following features:
- The base model was a Faster R-CNN with ResNet architecture, pretrained on the COCO Image Dataset (>200,000 images containing ~1 million object instances from 80 different object classes).
- The neural network was frozen up until the last 3 backbone layers allowing their weights to be fine-tuned on the custom “ski resort” dataset.
- 80% of the data was allocated to training/validation, and 20% was allocated to testing. Within the training/validation set, it was split 80% for training, 20% for validation.
- The model trained for up to
10epochs, with a stopping condition in place if the validation score started to rise after continuously falling for some number of epochs. - I used an initial learning rate of
0.0001with a learning rate scheduler set to decrease the learning rate by a factor of ten every 3 epochs. - Stochastic Gradient Descent (SGD) with a
momentum of
0.9was used as the optimization algorithm. I tried using ADAM, but that yielded lower performance. - The loss function being minimized by SGD is the Smooth L1 Loss or “Huber” loss.
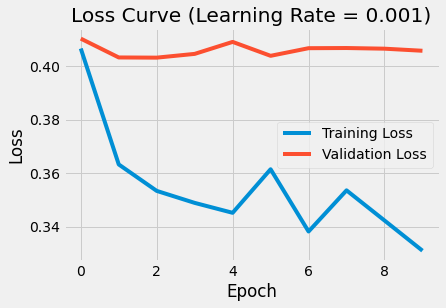
Training and Validation scores for each of the model’s training epochs.
In order to assess overfitting I plotted training loss and validation loss for every epoch. By the time the project was due, the model was still too complex. If I had more time, I would have:
- Experimented with introducing dropout layers.
- Experimented with removing some layers in the network to reduce complexity.
- Trained using a larger dataset.
- Leveraged more compute power to do k-fold cross validation to determine the optimal set of hyperparameters.
- Specifically messed around with weight decay (L2 regularization) to try and reduce model complexity.
Evaluating the Model
Quantitative Evaluation
As described earlier, object detection training data is composed of images, boundary boxes, and labels. A given image may contain multiple detectable objects, and its corresponding annotation will indicate the class of those objects (ex. “tree”) as well as pixel coordinates indicating the bounding box of each object. The boundary box label and coordinates provided in the training/testing data is ground truth. Once an object detection model is trained, it will output a set of predicted boundary boxes for any image it sees.
In order to score the performance of the model, we need some kind of metric to compare predicted and
ground truth boundary boxes/labels for every image in the test set. Intersection of Union (IOU) partially
serves this need by calculating the area of overlap divided by the total area that both boundary boxes take up
in space. If the predicted box were to exactly line up with the ground truth box, then IOU = 1.
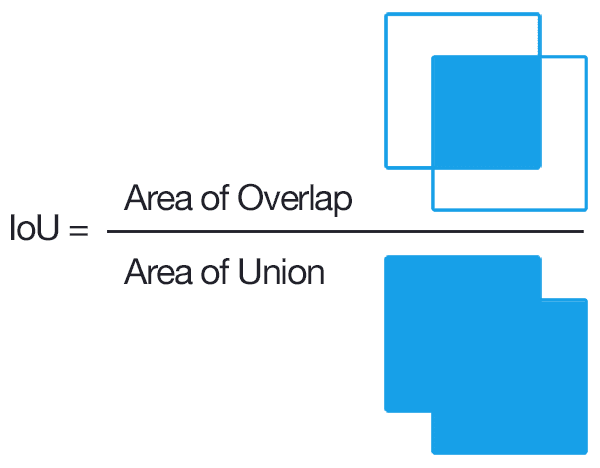
Intersection of Union (IoU) Calculation (Image: PyImageSearch)
However, this isn’t the final metric used to score the performance of the classification model. The evaluator function calculates mean precision and recall across all test images at various IOU’s and ranges of IOU’s. So, for instance, it will output the mean average precision (mAP) for all boundary box predictions that achieved between 0.5:0.95 IOU with their respective ground truth boundary box. This way of calculating accuracy-type metrics allows for some flexibility in how the user chooses to evaluate the results. For instance, if all I care about is generally detecting that something exists in an image, I might accept a precision score at an IOU of 0.5. However, if that objects exact location in space is important, I might look more at metrics evaluated at an IOU closer to 0.95.
My model achieved a mAP of 0.178 and a mAR of 0.319 for an IOU threshold range of 0.5:0.95. For reference,
the original object detection model that I applied transfer learning to achieve a mAP of 0.37 on the COCO
image dataset.
Qualitative Evaluation: The Demo
In order to simulate the performance of the model on an actual snow grooming vehicle, I found some dash cam footage from snow cats and go pro footage from skiers moving through a mountain. I used OpenCV to separate the videos into frames, applied the model to each frame and drew predicted boundary boxes, and stitched the frames back together into a video. This was the result:
Qualitatively, the model is able to detect trees, people, and poles. This demo revealed one major point of future improvement in the model: it is unable to distinguish “groupings” of objects relative to individual instances. It would be important for an autonomous snow grooming vehicle to be able to make this distinction. Upon further investigation, it turned out that the dataset I used actually indicated whether a ground truth bounding box applied to a group or single instance. This is something that could definitely be incorporated to improve the model in the future.
API
With just a bit of time to spare before the final presentation, I decided to prototype an API that contains an endpoint for making object detection predictions on any image. I didn’t spend time deploying it to a server, but it can be run on localhost. (See instructions on how to use it here.)
Below is the presentation I gave on this work for my capstone project at Metis. It is a high-level overview of what was discussed in this blog post.
 Comedy! (Image:
Comedy! (Image: 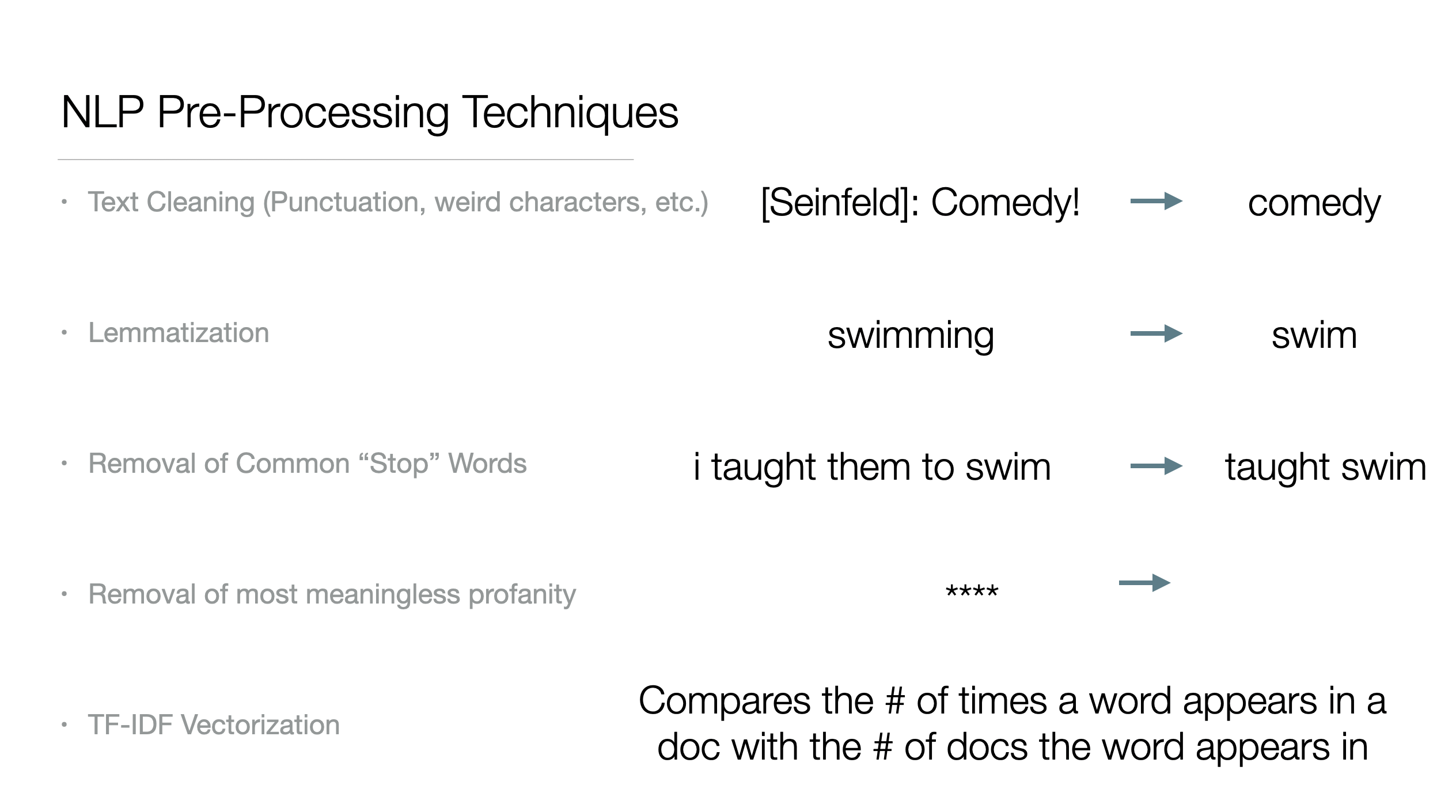 Summary of text cleaning steps.
Summary of text cleaning steps.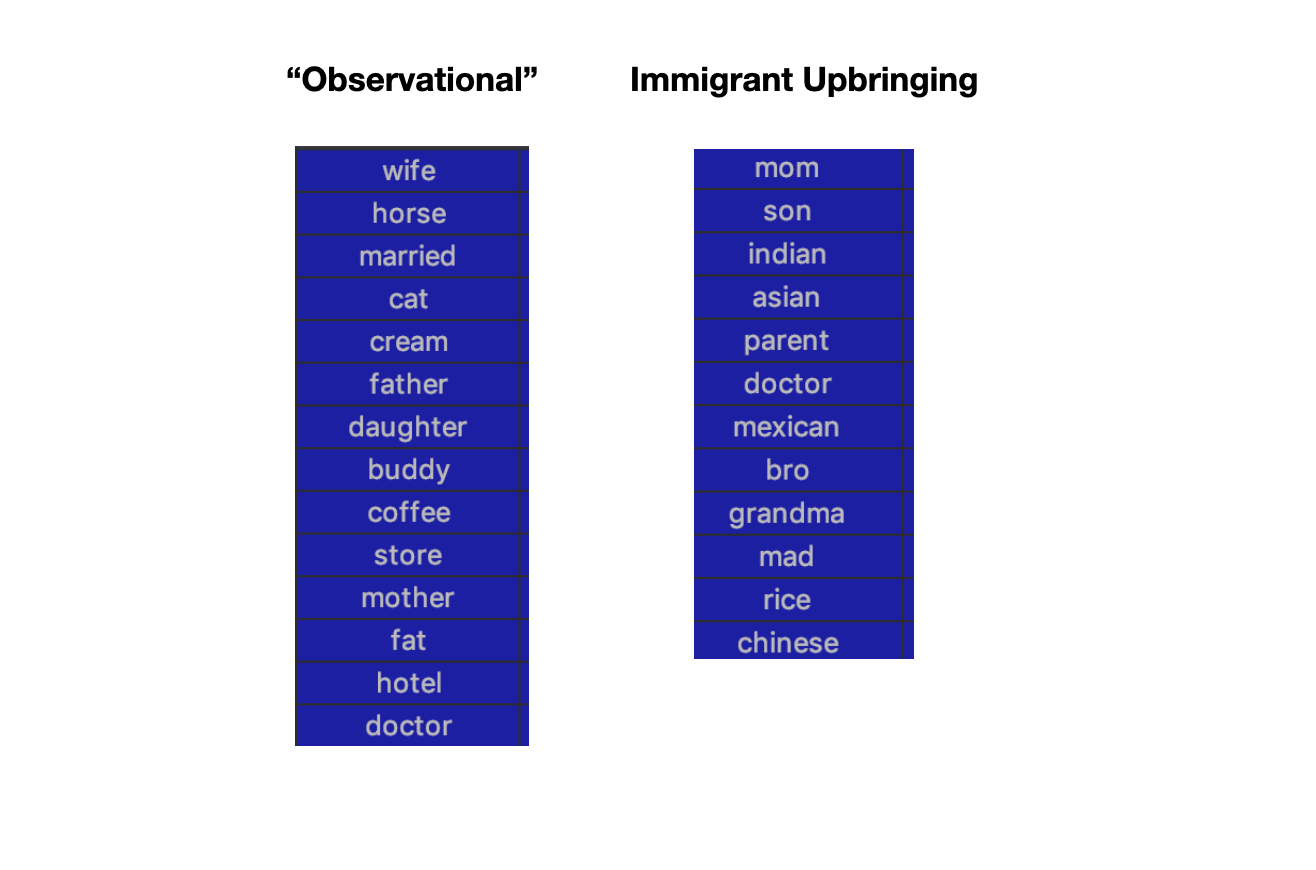 Examples of top words associated with modeled topics.
Examples of top words associated with modeled topics.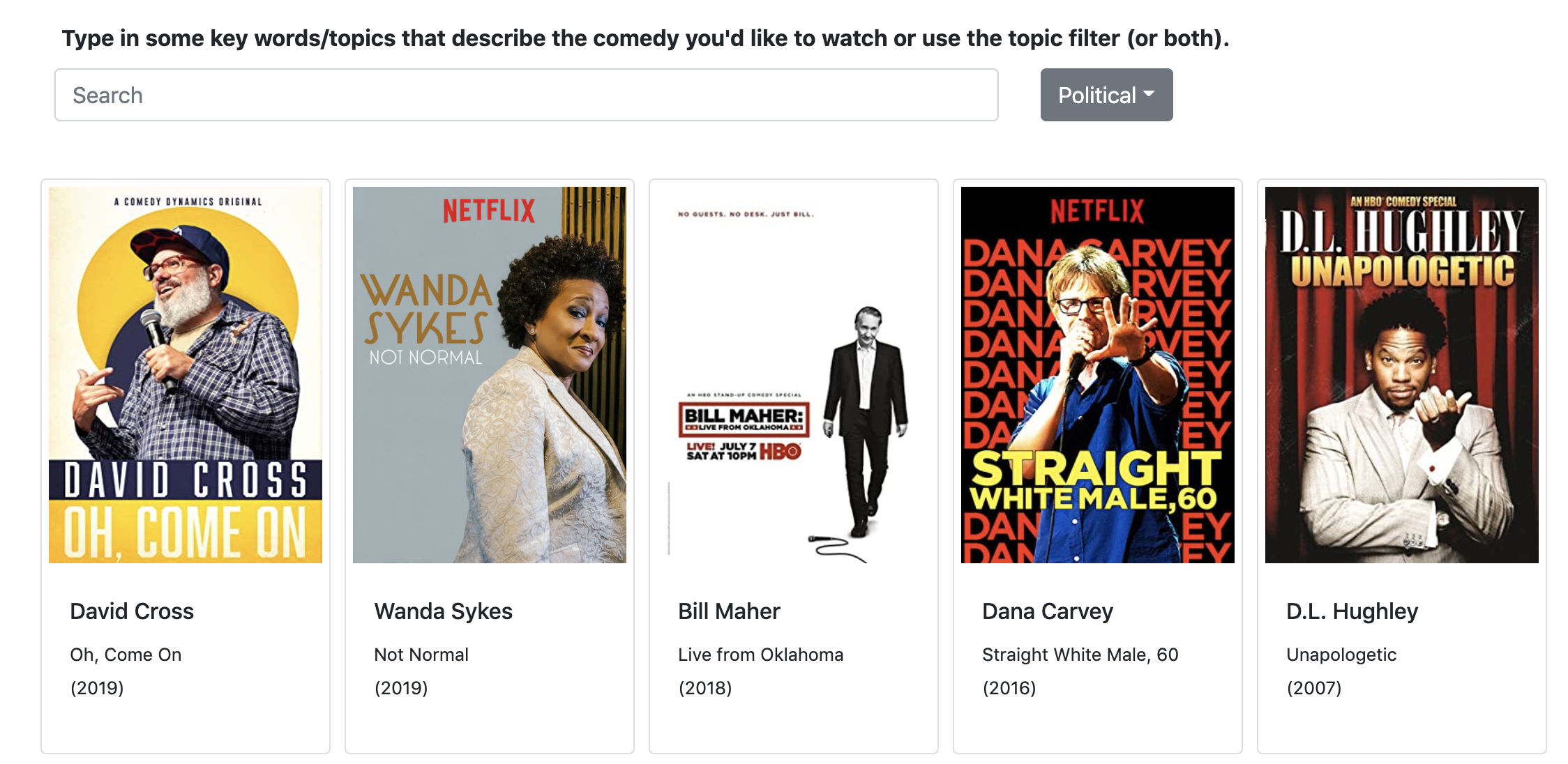 Filtering comedy by genres generated through topic modeling.
Filtering comedy by genres generated through topic modeling.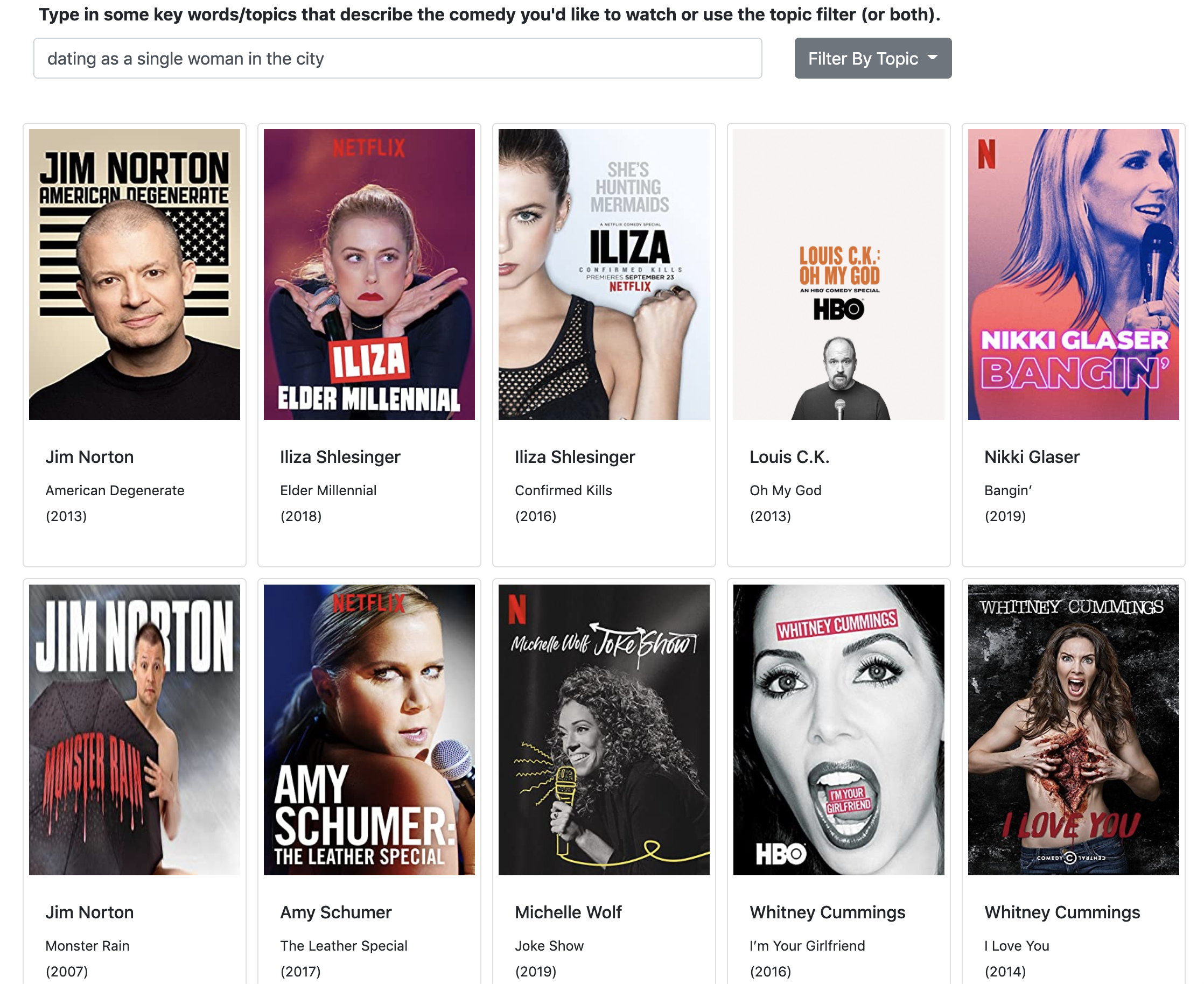 Search term recommender with content-based filtering
Search term recommender with content-based filtering